

Diverzita a funkční specializace
Tvar nanorobotů je rozhodující pro jejich funkci i aplikační využití. Jak ukazuje obrázek 2, každý typ konstrukce odpovídá specifickému úkolu:
- Nanoroboti ve tvaru jehly mají ostrý profil hrotu, který je předurčuje k minimálně invazivnímu proniknutí do biologických tkání. Tento tvar je vhodný pro aplikace, jako je cílené doručování léčiv nebo odběr vzorků při biopsii.
- Šroubovité tvary napodobují rotací pohyb šroubu a usnadňují průchod viskózními médii nebo stísněnými prostory pomocí rotace jejich těla.
- Bracket struktury slouží jako stabilní nosný rám pro přenos senzorů nebo jiných zařízení do těžko přístupných oblastí, přičemž udržují přesnost polohování i při působení vnějších sil.
- Řasinkoví roboti využívají mikrobiologické pohyby k transportu v tekutinách. Jsou inspirováni přirozeným pohybem řasinek v těle. Směrový tah generují pomocí oscilačního pohybu jemných výběžků. Tento mechanismus umožňuje efektivní navigaci v biologických kapalinách, jako je krevní plazma nebo mozkomíšní mok, a zároveň poskytuje možnost interakce s okolními buňkami či částicemi.
- Nanoroboti typu kapsle chrání citlivý terapeutický náklad, jako jsou léčiva nebo senzory, před degradací. Snadno se pohybují v měkkých tkáních.
- Sféra-Janus částice je kombinací kulovitého tvaru s asymetrickým povrchem, který umožňuje směrový pohyb v reakci na světlo, magnetické nebo elektrické pole. Díky tomu se mohou cíleně pohybovat a reagovat na okolní podmínky.
- Nanorody a mikrocívky nabízejí magnetické a mechanické vlastnosti využitelné pro snímání či tepelné aplikace.
- Trubicové struktury slouží jako kanály nebo nádrže pro transport látek.
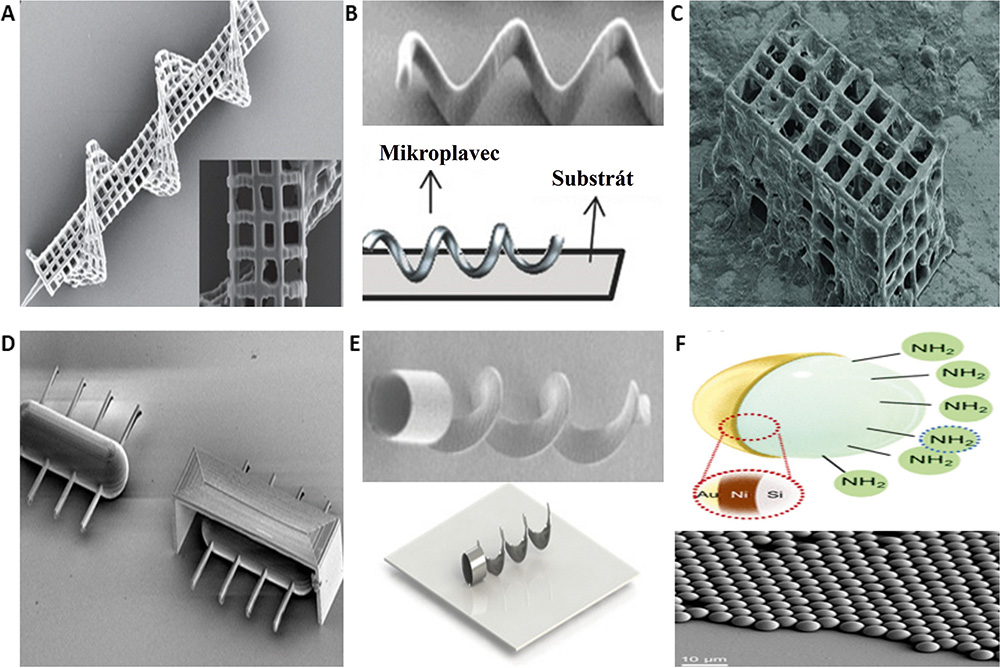
Obr. 2 Různé tvary nanorobotů: A. nanoroboti ve tvaru jehly, B. šroubovitý tvar, C. Bracket struktura, D. řasinkový typ, E. kapslový typ, F. sféra-Janus částice na bázi niklu
Konstrukce nanorobotů
Nanoroboti se vyrábí různými technologiemi, které umožňují precizní tvorbu struktur na úrovni nanometrů. Mezi klíčové metody patří např. PVD (physical vapor deposition) využívající fyzikální odpařování materiálu a jeho nanášení na substrát, čímž vznikají přesné tenké vrstvy s požadovanými vlastnostmi. Dále šablonová elektrodepozice, která umožňuje selektivní nanášení kovových vrstev do připravených matric. Využívá se pro výrobu magnetických a vodivých částí. Mezi metody vhodné pro výrobu biomimetických robotických komponent včetně pohyblivých částí se řadí mikroformování a vrstvená montáž. Samoskladba a 3D tisk umožňují řízené samouspořádání molekul a aditivní výrobní procesy pro konstrukci složitých struktur.
Pohonný systém nanorobotů je klíčovým prvkem jejich celkové funkčnosti. Mechanismy se liší podle prostředí, cílové tkáně a požadovaného účinku. Fyzikální pohony zahrnují zejména využití magnetického pole, které umožňuje hlubokou penetraci a přesné řízení. Dále je využíván optický pohon, který má vysokou prostorovou přesnost, ale omezený průnik do tkání, a elektrické či ultrazvukové pole k mechanické aktivaci nebo směrovému transportu. Chemické pohony fungují na principu reakcí s palivem, např. H₂O₂, jež vytvářejí gradienty nebo bubliny pro pohyb. Jejich výhodou je autonomie, nevýhodou naopak toxicita. Biologické a hybridní pohony využívají pohyb živých buněk (např. bakterií nebo spermií) nebo jejich kombinaci s umělými komponenty, čímž dosahují přirozeného zacílení a vysoké biokompatibility, i když za cenu složitější kontroly.
Strategie cíleného doručování léčiv
Nanoroboti nachází využití napříč různými biomedicínskými oblastmi. Patří sem např. mechanické fagocytující jednotky pro eliminaci patogenů z krve, dentální nanoroboti v oblasti nanostomatologie nebo biomimetické konstrukce maskované membránami červených krvinek, které díky integrovaným magnetickým spirálám umožňují cílenou navigaci a zároveň se vyhýbají imunitní detekci. Tyto struktury využívají fyziologickou podobnost s vlastními buňkami těla k tomu, aby se vyhnuly imunitnímu systému, a zároveň slouží k cílenému doručování léčiv díky možnosti magnetické navigace.
Další pokrok představují Janusovy mikromotory poháněné vodou, hydrodynamické pohony s detekční funkcí toxinů či zinkové nanokapsle aktivované žaludeční kyselinou. Vybrané platformy jsou schopny odstraňovat tukové nánosy z vnitřních povrchů cév nebo likvidovat konkrementy ultrazvukovou ablací. Magneticky navigované bezpalivové nanomotory pak slouží k doručování cytotoxických látek přímo k nádorovým buňkám.
Energetické pohony nanorobotů zahrnují chemická paliva (např. glukóza, voda, peroxid vodíku), fyzikální pole (např. magnetická, elektrická nebo optická) i bionické bezpalivové mechanismy, které napodobují pohyb přirozených buněk a umožňují řízený transport bez nutnosti externího paliva (např. pomocí řasinek, bičíků nebo membránových oscilací).
Vzrůstající důraz na biokompatibilitu vedl ke specifické funkcionalizaci povrchu nanomotorů s využitím biomolekul, jako jsou enzymy, monoklonální protilátky, DNA struktury a aptamery. Tyto prvky zvyšují přesnost cílení, umožňují selektivní interakci s buňkami a přispívají ke zvýšení účinnosti léčby při současném omezení nežádoucích účinků.
Moduly pro nakládání a cílení léčiv jsou klíčové pro aktivní transport léku. Analogicky jako GPS navigace v automobilu nanoroboti využívají systém značení ligandy, který zahrnuje specifické vazebné molekuly (např. monoklonální protilátky, peptidy, foláty) k selektivní vazbě na nádorové buňky a k přesnému doručení terapeutického nákladu. Díky svým nanometrovým rozměrům tyto struktury snadno pronikají do tkání, podporují tak efektivní absorpci buňkami a současně snižují zátěž pro zdravé tkáně.
Existují dvě základní strategie, jak nanoroboti doručují léčiva: pasivní, kdy je léčivo fyzicky uzavřeno v dutinách nebo kapslích nanostruktury, a aktivní (tzv. samopodávání), kdy je účinná látka chemicky či fyzikálně navázaná na nosič a uvolňuje se cíleně po dosažení cílové oblasti. Nanoroboti o velikosti 1–2 µm mohou nést léčivý náklad až do objemu 1 mm³, který je uložen v tzv. palubních nádržích a dávkován pomocí molekulárních čerpadel. Pro aplikace v centrálním nervovém systému se využívají tzv. neuronanoroboti – typicky endoneurální, gliové nebo synaptické konstrukce, které jsou schopny překonat hematoencefalickou bariéru (BBB) a proniknout do specifických struktur mozku. Nanonosiče určené
k doručování léčiv mají schopnost pronikat mikroprostředím gliomu, chránit náklad (např. antigeny a adjuvancia) a minimalizovat jejich degradaci i toxicitu.
Magnetické nanomotory jsou řízeny vnějším polem, které umožňuje kontrolu směru a rychlosti, a po splnění účelu jsou odstraněny např. endocytózou. Tento princip transformuje tradiční podávání léčiv v šetrnější, cílenější a účinnější terapeutický systém.
Překonání hematoencefalické bariéry
Moderní přístupy k překonání hematoencefalické bariéry zahrnují osmotické otevření bariéry pomocí hyperosmolárních roztoků, fokusovaný ultrazvuk, penetrující peptidy (CPP) a využití magnetických gradientů. Tyto přístupy podporují transport magnetických nanočástic do specifických oblastí mozku, jako je čichový bulbus, a tím rozšiřují možnosti cíleného doručování léčiv přes hematoencefalickou bariéru. Mezi často využívané nanomateriály patří polymery (např. PLGA, PLA), liposomy, dendrimery, exosomy, zlaté nanočástice a nanoprotilátky.
Funkcionalizace nanonosičů specifickými ligandy (např. β-amyloidními peptidy, protilátkami nebo transferinovými molekulami) umožňuje cílené zaměření na struktury mozku a zvyšuje úspěšnost doručení. Příkladem je použití nanorobotické platformy nesoucí doxorubicin pro terapii glioblastomu nebo konstrukce zaměřené na pH-reaktivní uvolňování léčiv v kyselém prostředí nádorů.
Další metodou je ultrazvukem aktivované doručování, kdy se mechanické vibrace přenášejí na strukturu nanorobota, dochází k jeho destabilizaci a uvolnění terapeutické nálože. Tento princip zvyšuje akumulaci léčiv v nádorové tkáni a usnadňuje průnik do hlubších oblastí mozku.
Příklady dalších inovací
Mezi pokročilé strategie cíleného podávání léčiv pro onemocnění mozku patří například liposomy modifikované imunomodulátorem FK506, které cílí na ischemicky postižené oblasti mozku, nebo polymerní nanogely pro nazální aplikaci inzulinu. Využívají přímý transport přes čichový epitel do CNS a představují slibnou neinvazivní možnost léčby neurodegenerativních onemocnění.
Dále se uplatňují nanočástice vybavené peptidy pronikajícími do buněk (CPP), které usnadňují aktivní přestup léčiv do intracelulárního prostoru, včetně neuronálních buněk. Významný potenciál mají i fotoaktivní nanostruktury – například nanoformy s fotosenzitivními polymery nebo zlaté nanodráty schopné absorbovat blízké infračervené světlo, a vyvolat tím termální uvolnění nákladu.
V oblasti genové terapie pak zaujímají místo exozomy nesoucí siRNA určené k potlačení patologické exprese genů. Vývoj se rovněž zaměřuje na nanočástice navržené pro doručení specifických léčiv – například kurkuminu (antioxidační a protizánětlivý účinek), cisplatiny (cytotoxická chemoterapie), olanzapinu (antipsychotikum) nebo ropinirolu (dopaminový agonista pro léčbu Parkinsonovy choroby).
Využití nanorobotů při léčbě rakoviny mozku
Jedním z příkladů je nanorobot NK@AIEdots, inspirovaný killer cells. Tento nanorobot je schopen překročit BBB a akumulovat se v glioblastomových buňkách. Jeho schopnost imunitního dozoru v CNS a doručování léčiv z něj činí nadějný nástroj pro fototermální terapii a vizualizaci nádorů. Podobně nanoroboti na bázi DNA s aktivní difuzí a chemotaktickým pohonem (např. se zapouzdřenou glukózooxidázou) se mohou pohybovat tkáněmi a doručovat léčiva do cílových struktur. Samorozložitelní nanoroboti na bázi DNA s terapeutickým nábojem (např. tFNA-siCCR2) prokázali účinnost při modulaci neurozánětů a ochraně nervových funkcí.
Nanoroboti s pohonem na bázi hořčíku (HPM) reagují s vodou za vzniku vodíku, který nejen podporuje jejich pohyb v mozkomíšním moku (CSF), ale také zmírňuje oxidační stres v místě léze. Využívají se například při léčbě ischemické mozkové příhody.
RPNRs (rojící fotoničtí nanoroboti) kombinují magnetické nanočástice s hydrogely a vykazují schopnost měnit barvu v závislosti na pH a teplotě. Díky tomu slouží nejen jako inteligentní nanosenzory pro monitorování mikroprostředí nádoru v reálném čase, ale rovněž jako terapeutická platforma pro lokalizovanou fototermální terapii – např. cílené zahřívání nádorových tkání při léčbě glioblastomu, které umožňuje koagulaci a destrukci nádorových buněk s minimálním dopadem na zdravé okolí.
Nanoroboti s magnetickým pohonem (např. Cellbot, kapslové nebo Janus nanostruktury) se úspěšně využívají k cílenému doručování terapeutických buněk či léčiv do hlubokých struktur centrálního nervového systému (CNS), včetně mozkových komor nebo specifických oblastí mozkové kůry. Jejich řízení pomocí vnějšího magnetického pole umožňuje přesnou navigaci a uvolnění nákladu v místě určení, zatímco molekulární zobrazovací techniky (např. magnetická rezonance nebo fluorescence) zajišťují sledování v reálném čase. Pokročilým příkladem je mikromotor založený na biokompatibilní spirulině (jednobuněčné vláknité sinici s přirozeně spirálovitým tvarem vhodným pro manipulaci a transport v biologických tekutinách) doplněné o piezoelektrické nanočástice. Je schopen autonomního pohybu v biologických tekutinách a cíleně stimuluje neurony k diferenciaci na funkční nervové buňky. Má velký potenciál využití v terapii neurodegenerativních onemocnění.
Magnetotaktické bakterie nebo nanorobotické mikrosvazky (např. tPA-nboti) představují další slibné aplikace v cílené léčbě, zejména při trombolytických terapiích. Mohou aktivně transportovat fibrinolytická činidla, jako je tkáňový aktivátor plasminogenu (tPA), přímo k místu krevní sraženiny. Současně mohou být tyto struktury nasměrovány do anoxických (kyslíkem ochuzených) oblastí nádorů, kde podporují selektivní doručení léčiv nebo diagnostických látek, čímž zvyšují účinnost terapie a snižují poškození zdravé tkáně.
K dalším příkladům patří nanoroboti využívající rotující laserem poháněné elementy, které umožňují přesné řízení směru růstu axonů, a tím podporují regeneraci poškozených nervových vláken. Nanoroboti s povrchem tvořeným membránou bakterie E. coli, která zajišťuje chemotaktický pohyb do míst se zvýšenou zánětlivou aktivitou, se uplatňují například při nádorech či infekcích CNS.
Omezení a perspektivy dalšího vývoje
Vývoj a klinické nasazení nanorobotů v léčbě rakoviny mozku jsou doprovázeny řadou výzev. Klíčovým požadavkem je zajištění biokompatibility a biodegradability použitých nanomateriálů, aby nedocházelo k toxickým reakcím nebo kumulaci částic v těle. Rovněž chybí dostatečně přesné a dostupné zobrazovací technologie pro sledování pohybu a chování nanorobotů v reálném čase. Výroba těchto systémů je technologicky náročná a její rozšíření z laboratorního měřítka na stabilní a efektivní výrobu v klinickém rozsahu není stále dostatečně vyřešeno.
Další omezení vyplývají z fyzikálních limitů magnetického a optického řízení nanorobotů, jejichž dosah je omezený a účinnost může být narušena složitostí biologického prostředí. Ta navíc výrazně komplikuje přesnou navigaci i cílení na patologické struktury.
V neposlední řadě je třeba zohlednit regulační požadavky a etické otázky spojené s aplikací autonomních systémů v těle pacienta. Výzkumné týmy se proto zaměřují na zdokonalování pohonných modulů, testování bezpečnosti a účinnosti v klinických podmínkách a vývoj technologií, které umožní širší a bezpečné nasazení těchto nástrojů v neuroonkologii.
Ing. Jana Brabcová, Ph.D.
Zdroj: Xu M, Qin Z, Chen Z, et al. Nanorobots mediated drug delivery for brain cancer active targeting
and controllable therapeutics. Discover Nano. 2024;19:183.
Foto: Shutterstock
